







- Examinar las categorías
- Dron YQFH
- Dron DJI
- Otros vehículos aéreos no tripulados
- Cargas útiles de drones
- Robot
- Detector/localizador de tuberías y GPR
- Escáner láser 3D
- Dispositivos de medición industriales
- Serie de estaciones meteorológicas
- Instrumentos de inspección óptica
- Sistemas RTK GNSS
- Productos del sistema BDS
- Sistema de monitoreo de desplazamiento visual
- Sistema de posicionamiento interior UWB
- Productos de hidrología
- Otros
- Espectrómetro
- Máquina de chorro húmedo
- Probador de suelo SDI
- Sistema de inspección y patrullaje con drones voladores inteligentes Pengjin
- Supercomputación
- viscosímetro
- Higrotermógrafo eléctrico
- Ecosonda
- Software
- Herramientas de medición Keson








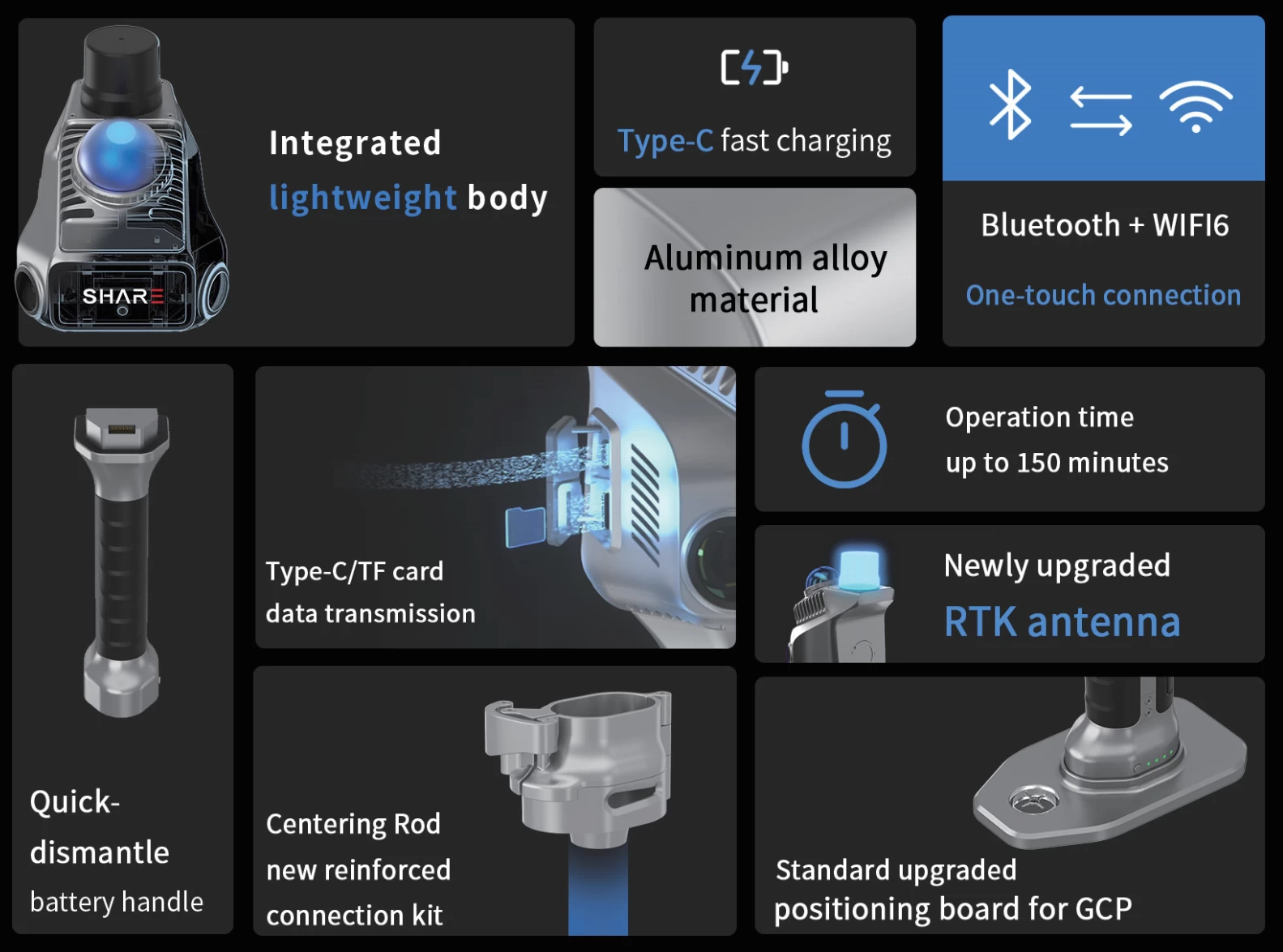
3D Lidar Scanner Share SLAM S20
- Dimensiones: 110.5*140*333.3 mm
- Peso: 1079g
- Capacidad de la batería: 45.36wh (3150 mAh)
- Tiempo de trabajo: 150 min
- Puerto de carga: Tipo-C; PD30 W Cargo rápido
- Temperatura de trabajo: -20 ℃ ~ 50 ℃
- Temperatura de almacenamiento: -20 ℃ ~ 60 ℃
- Capacidad de almacenamiento: 256 g
Escáner lidar 3D S20
Descripción detallada
Característica
 |
|
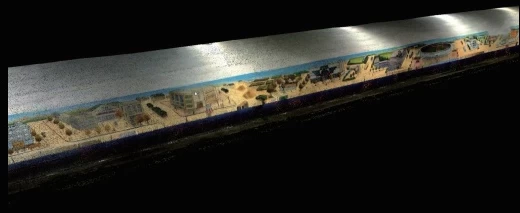
Nube de puntos coloren preciso Con una sincronización de tiempo de hardware a nivel de microsegundos a nivel de sistema, esto da como resultado datos de nubes de puntos altamente precisos. Asegura una integración perfecta de las nubes de color e intensidad. |
 |
|
|
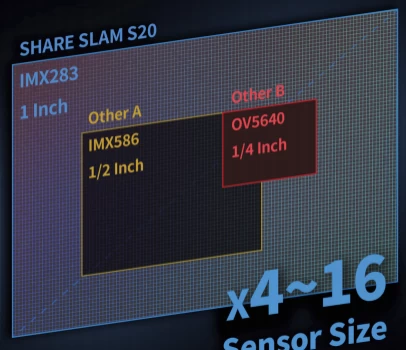
Sensor de imagen de formato grande de una pulgada Equipado con sensores CMOS de formato grande de una pulgada, con tamaño de píxel de 2.4 μm y 16 megapíxeles efectivos por lente. Esta configuración ofrece una claridad de foto mejorada y una colorización de nube de puntos más precisa y clara. |
 |
Obturador mecánico de grado profesional
El obturador mecánico permite la exposición global sin efecto de gelatina. Esto garantiza una colorización de nubes de puntos coloridas más precisa y hace que las fotos sean muy adecuadas para el modelado de fotogrametría de la siesta del objeto.
  |
|
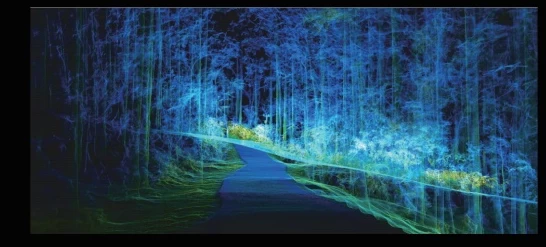
Impulsado por algoritmos propietarios Slam Rtk lidar escáner fábrica directamente desde china, El sistema ofrece un rendimiento robusto con los algoritmos de Slam y Visual Slam Visual Slam y Slam Visual Slam y la densidad de nubes en tiempo real y los efectos de colorización, lo que lo hace adaptable a diversos escenarios complejos. |
 |
 |
|
|
Abrir interfaces de hardware Las interfaces de hardware abiertas habilitan la colaboración multiplataforma. Open SDK admite la comunicación del dispositivo, la transferencia de datos y el control operativo, ideal para nuevos equipos de topografía (por ejemplo, sistemas de inteligencia incorporados). |
Las fotos admiten modelado 3DGS En beneficio de la cámara de formato grande de una pulgada y combinada con la tecnología de metadatos de pose de imagen, las fotos son claras con color uniforme. Esto los hace más adecuados para la generación de modelos de splatting Gaussian 3D. |
|
 |
 |
|
|
Optimizado para flujos de trabajo de postprocesamiento Nube de puntos Data se integra a la perfección en flujos de trabajo BIM/CAD. Aprovechar los datos de nubes de puntos de alta precisión permite el mapeo y el modelado eficientes. |
Admite la generación de modelos de malla Los datos sin procesar son totalmente accesibles para los desarrolladores de software, lo que les permite procesar los datos utilizando sus propios algoritmos SLAM. Las fotos se pueden utilizar para modelos de malla, satisfaciendo las necesidades de procesamiento de datos en varias industrias. |
Presupuesto
| Parámetro físico | |
| Peso | 1.07 kg (esta batería) |
| Batería | 14,8V 3150 mAh |
| Duración | 150 minutos |
| Cargar | USB-C 30W (carga rápida) |
| Almacenamiento | 256 GB (tarjeta SD) |
| Nivel de protección | IP54 |
| Temperatura de trabajo | -20 ℃ -55 ℃ |
| Plataforma de transporte | Manual |
| Modos de trabajo | Pure Slam, puntos de control y RTK |
| Unidad láser | |
| Rango de detección | 40m@10%, rango máximo 70m |
| Precisión relativa | 1 cm |
| Precisión absoluta | 5 cm |
| LiDAR FOV | H: 360º - V: 52º H: 360º - V: 52º H: 360º - V: 52º |
| Clase LiDAR | Clase 1 |
| Tasas de puntos | 200,000 puntos/seg |
| Unidad GNSS (POS) | |
| RTK | Integrado |
| Precisión de RTK | H: 0,8cm 1ppm - V: 1,5cm 1ppm |
| Cámara | |
| Número de cámara | 2 |
| Resolución de poder | Total de 24 millones de píxeles |
| Tasa de resolución de cámara única | 12 millones de imágenes |
| Ángulo de campo de visión fotográfico | 360 °*270 ° |
| Formato de foto | .png |
| Datos y software | |
| Espesor puntual | Dentro de 1 cm |
| Método de procesamiento | Solución en tiempo real/ solución post |
| Precisión absoluta | Mejor que 5 cm |
| Precisión relativa | Mejor que 1 cm |
| Formato de nubes de puntos | Formatos comunes como.las, PCD, capa, etc. |
| Point cloud | Admite una vista previa de las nubes de puntos de color |
| Software móvil | Admite iOS y Android |
| Software de escritorio | Admite la salida de un clic de las nubes de punto de color |
| Navegación de nubes de puntos construidos | Soporte de la Asociación de Cloud de Puntos y Espacio de Imagen Vie |
Tel:+8615899753550
Wechat:pjk2018666
Persona de contacto:linda lin

- Otros productos




