







- Examinar las categorías
- Dron DJI
- Dron YQFH
- Otros vehículos aéreos no tripulados
- Cargas útiles de drones
- Robot
- Espectrómetro
- Dispositivo de medición mecánica
- Sistema de medición de desplazamiento visual
- Instrumentos de inspección óptica
- Sistemas RTK GNSS
- Detector/localizador de tuberías y GPR
- Carga útil de vehículos aéreos no tripulados
- Cámara térmica
- Escáner láser 3D
- Máquina de chorro húmedo
- Instrumento de medición Plainmeter
- Serie de estaciones meteorológicas
- Probador de suelo SDI
- Sistema de inspección y patrullaje con drones voladores inteligentes Pengjin
- Supercomputación
- USV
- viscosímetro
- Higrotermógrafo eléctrico
- Ecosonda
- Software
- Herramientas de medición Keson


|
|
|
|
|
|
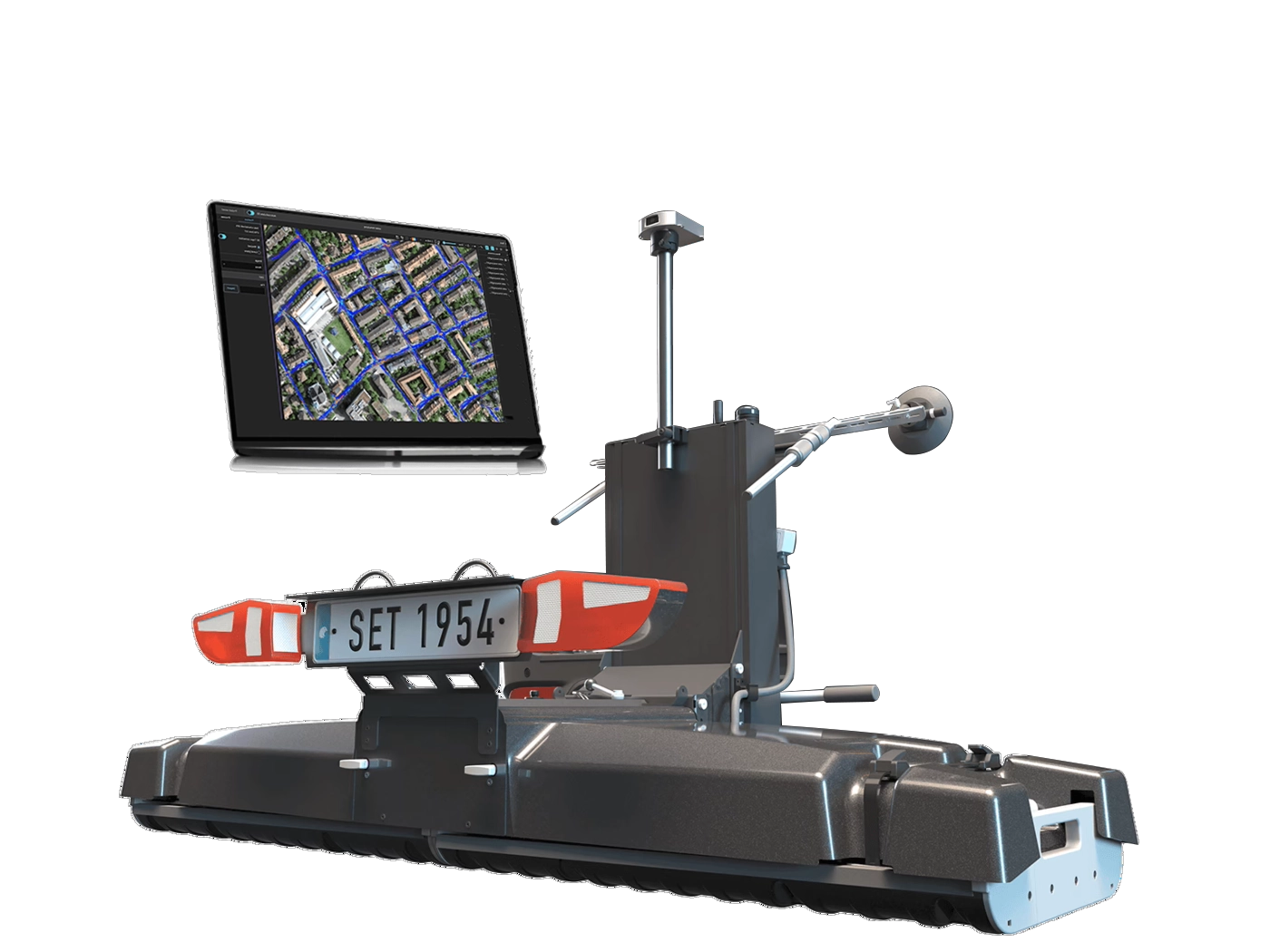
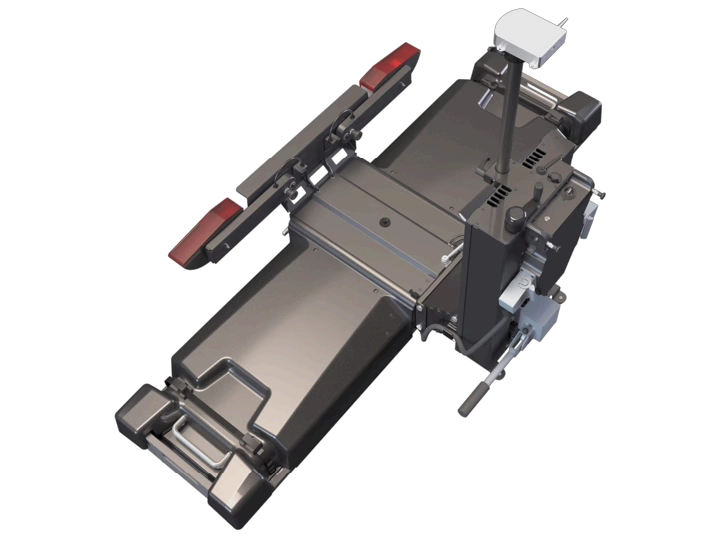
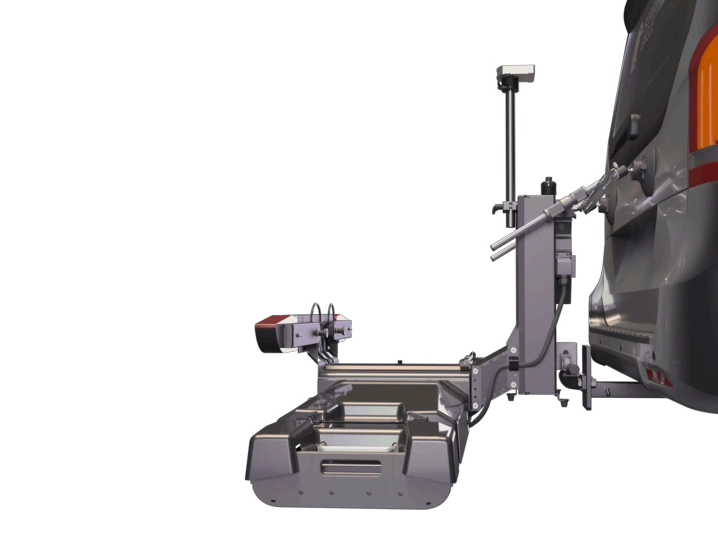
| Sistema modular de cartografía móvil GPR multicanal para el subsuelo |
 |
 |
 |
||
| Versatilidad | Precisión | Eficiencia | ||
| Matrices GPR intercambiables para detección cercana a la superficie y profunda para escalar su solución fácilmente y abordar nuevas aplicaciones. | La mayor densidad de información en las tres dimensiones, mapeada con precisión incluso en condiciones difíciles. | Fácil de configurar, operar y obtener información. Recogida de datos a alta velocidad y camino directo a la oficina. |
Parámetros técnicos
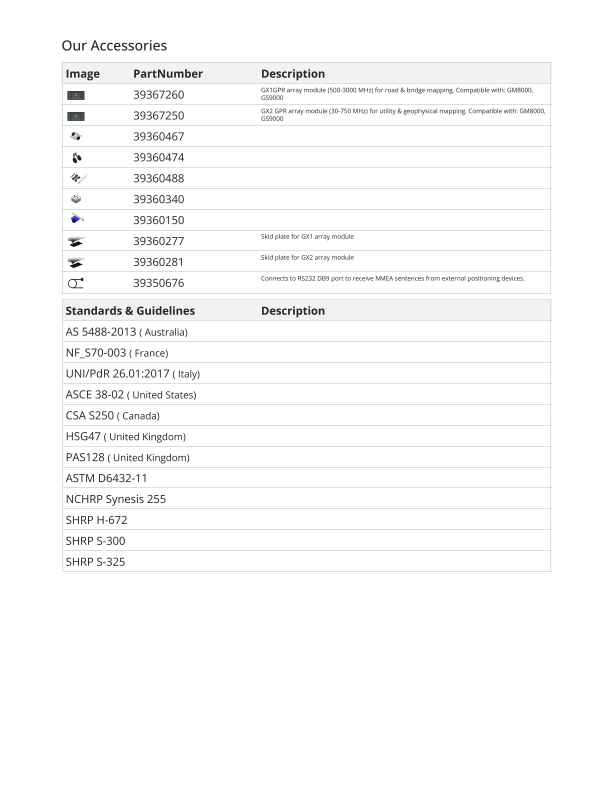
| Tecnología de radar | GPR de frecuencia escalonada |
| Rango de frecuencia modulada | 500 – 3000MHz² | 30 – 750MHz³ |
| Número de canales | 71 (VV) 31 (HH) ² | 23 (VV)³ |
| Espaciado de canales | 2,5 cm (VV), 5,5 cm (HH)² | 7,5 cm³ |
| Ancho de escaneo | 1,75m² | 1,67 m³ |
| Velocidad de escaneo | 27500 escaneos/s ² | 22000 escaneos/s ³ |
| ventana de tiempo | 45 ns² | 130 ns³ |
| Velocidad de adquisición | Hasta 80 km/h ² ⁴ | Hasta 180 km/h ³ ⁵ |
| Intervalo espacial | Hasta 100 escaneos/m |
| Dimensiones | Longitud total: 923 mm | Ancho total: 1882 mm |
| Weight | 87 - 93 kilos¹⁰ |
| odometria | Radar Doppler o sensor de velocidad de la rueda |
| Protección de ingreso (IP) / sellado | IP65 |
| Sistema de remolque | Enganche trasero, bola de 50 mm |
| Sistema de absorción de impactos | Ruedas hidráulicas antigolpes opcionales. |
| Fuente de alimentación | Alimentación a través de Ethernet / 12 V externa |
| Temperatura de funcionamiento | -10° a 50°C | 14° a 122°F |
| Humedad de funcionamiento | <95% HR, sin condensación |
| Conectividad | USB-C, USB-A, 2x Ethernet Alimentación, 2x Lemo ⁶, 2x Conector de antena ODU, E/S universal (UART, CAN-Bus) |
| Satélites GNSS | GPS multibanda Glonass Galileo Beidou |
| Correcciones GNSS en tiempo real | Compatible con NTRIP RTK ⁷ |
| Precisión RTK | Tipo. 1 - 5 cm | 0,5 - 2 pulgadas ⁸ |
| Precisión de interrupción RTK | <0,1 % de deriva/distancia ⁹ |
| Fusión de sensores | GNSS IMU Imágenes de cámara Velocidad de rueda |
| Seguimiento de funciones | si |
1. Ejecutar una versión actualizada de iOS; Modelos recomendados: MacBook Pro® modelo 2022 o superior
2. En combinación con 2x módulos de matriz GX1
3. En combinación con 2x módulos de matriz GX2
4. Con una separación de 100 mm
5. Con una separación de 50 mm
6. Para sistemas de posicionamiento terrestre, es posible que se necesite un adaptador serial intermedio a DB9 para generar la posición Pseudo NMEA GGA.
7. Necesita una conexión activa a Internet en el iPad; Correcciones NTRIP en formato RTCM3
8. La precisión lograda está sujeta a las condiciones atmosféricas, geometría del satélite, tiempo de observación, etc.
9. Mediante ajuste del paquete entre
Nuestros accesorios
Tel:+8613828792860
Wechat:PJK13828792860
Persona de contacto:janet luo

- Otros productos



